



なんで人間よりあんなに速く走れるの?
「背骨がエンジン」って具体的にどういうこと?
走っている最中に「2回も浮く」って本当なの?
芝生のコースと砂地のコース、なんで得意・不得意が出るの?
子犬の時に走らせすぎると、将来に影響しちゃうの?
うちの子は「歩幅派(ストライド)」?それとも「回転派(ピッチ)」?
こんな疑問・悩みを解決します。
1.人類を超越する「時速60km」の衝撃
2.空を2回飛ぶ「特殊なギャロップ」の仕組み
3.推進力のメインモーター「背骨のエンジン」
4.筋肉の限界を超える「ゴムのバネ」構造
5.路面とカーブを攻略する「現場の走行理論」
6.一生しなやかに走るための「成長とケア」
この記事では、脚の筋力だけに頼らず、背骨のしなりを推進力に変える『脊椎エンジン(Spinal Engine)』の仕組みを徹底解剖。ダブルサスペンションギャロップの構造から、愛犬のポテンシャルを安全に引き出す成長期ケアを紹介していきます。
記事を読み終えた時に、少しでもお役に立てれば嬉しいです。
- 時速60kmの科学的根拠
人類最速を凌駕するスピードが、脚力ではなく「背骨のしなり(脊椎エンジン)」から生まれる物理的理由。 - 「2回浮く」空中走法の正体
歩幅を最大化するダブルサスペンションギャロップの4フェーズと、加速を支える筋膜のゴム弾性。 - 競技で勝つための路面・カーブ攻略
砂地と芝生での走法切り替えや、遠心力に負けない「体幹スタビライザー」を育てる現場の知恵。 - 一生しなやかに走るための医学的ケア
骨格が完成する18ヶ月までの成長タイムラインと、背骨の柔軟性を守るノーズワークの有効性。
ウィペットが高速で走れる理由は、以下の3つの要素が組み合わさっているためです。
- 背骨の運動を推進力に変えるSpinal Engine(脊椎エンジン)のメカニズム
- 空中に2回浮くことで歩幅を最大化するダブルサスペンションギャロップ
- 筋膜と腱に蓄えたエネルギーを解放する弾性リコイル(跳ね返り)
この3つのバイオメカニクスによって、ウィペットは自身の体長の数倍にも及ぶ驚異的なストライド(歩幅)を生み出し、時速60kmに迫る圧倒的なスピードを実現しています。
ウィペットの最高速度はどれくらい?他犬種や人類との比較
 ヌプツェ
ヌプツェみんな、私たちウィペットがドッグランで走ると「速すぎて見えない!」って言うよね。
実際、私たちがどれくらい速いのか、他のワンちゃんや足が速い人間と比べてみたよ。
私たちの本当の凄さを知ってね!
世界トップクラスのスピード比較
ウィペットの最高速度は、時速56〜60kmに達します。これは犬界のスピードスター、グレイハウンドに次ぐ速さです。

※数値はギネス世界記録や各国の競技記録に基づく一般的な目安であり、諸説あります。
ウィペットが人類最速のスプリンターよりも速く走れる理由は、単なる脚の筋力だけではなく、全身を一つの「バネ」として機能させる優れた骨格構造にあります。
 ローツェ
ローツェボルトさんよりも速いなんて、ちょっと自慢しちゃってもいいかな?
でも、このスピードを支えるには、これから説明する「体の秘密」が欠かせないんだよ!
サイトハウンドの進化とスピードを生む基本構造
ヌプツェ私たちウィペットは「サイトハウンド」っていう仲間のひとり。
獲物を見つけて追いかけるために、何千年もかけてこの体が作られてきたんだ。
シュッとした体には、速く走るための理由がちゃんとあるんだよ。
サイトハウンド(視覚猟犬)の共通特徴
ウィペット、グレイハウンド、サルーキなどのサイトハウンドは、優れた視覚と爆発的な走力で獲物を追うために特化した犬種群です。彼らに共通する骨格的特徴は、「深い胸(大きな心臓と肺を収めるため)」と、「極端に引き締まった腹部(タックアップ)」です。
全身バネ構造による推進力
動物の走行速度は、運動学の基本関係として以下の式で表されます。
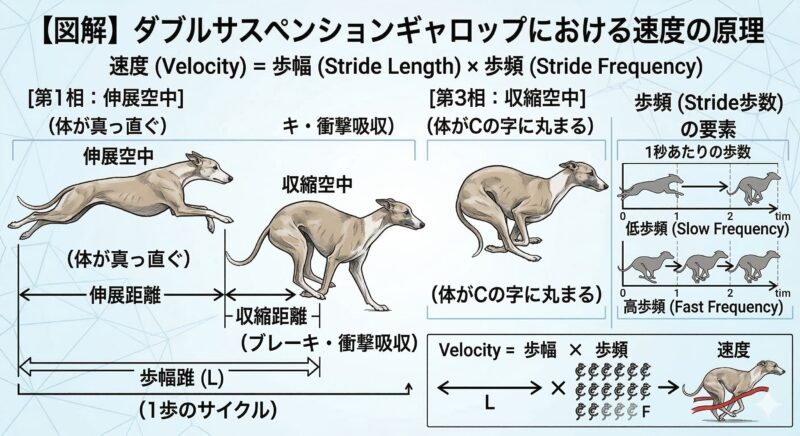
深い胸の中には、大量の酸素を全身に送る巨大な心臓があり、引き締まったお腹は、後ろ脚を前脚よりもはるか前方に踏み込ませるための物理的な空間を確保しています。この構造により、脚の回転数だけでなく、一歩あたりの距離(歩幅)を極限まで伸ばすことが可能になっています。
ローツェ胸が深いのは、たくさん酸素を吸ってエンジンを回すため。
お腹が細いのは、足を思いっきり前に出すため。全部、走るための機能的なデザインなんだね!
空中を2回飛ぶ「ダブルサスペンションギャロップ」の仕組み
ヌプツェ私たちウィペットが全力で走っている時、スローモーションで見ると空中に2回浮いてるんだって。
1歩の間に「飛んで、着いて、また飛ぶ」っていう、不思議な動きをしているの!
見てみて!
4つのフェーズ(位相)によるサイクル解剖
ウィペットの走法は、1ストライド(1歩)の間に、力学的に異なる4つの役割をこなしています。
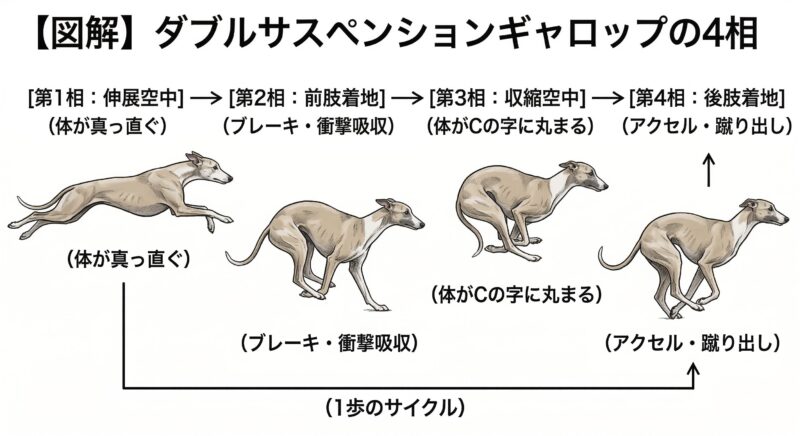
- 第1相(伸展サスペンション)
前後の脚を伸ばしきり、直前の蹴り出しによる慣性で滑空する局面。主に空気抵抗を受けます。 - 第2相(前肢着地):
Carrierら(1998)の研究が示す通り、前肢で着地し、主に衝撃の吸収と制動(ブレーキ)を行います。 - 第3相(収縮サスペンション):
4本の脚が再び宙に浮きます。背中を深く丸め、後ろ脚を前脚より前に振り出す「タメ」の局面です。 - 第4相(後肢着地):
Walterら(2007)が証明したように、後肢がメインモーターとして地面を蹴り、爆発的な推進力を得ます。
2サスペンション(空中浮遊)の価値
「2回浮く」ことで、地面との摩擦抵抗がない時間を長く作れます。特に第3相(収縮期)で背中を深く丸めることで、次の蹴り出しのための加速区間を最大化し、驚異的なストライド拡張を実現しています。
ローツェ空を飛んでいる時間が長いほど、遠くに、速く進めるんだ。
背中を「グッ」と丸める瞬間が、一番パワーを貯めてる時なんだよ。
脊椎エンジン(Spinal Engine)の理論と科学的知見
ヌプツェ私たちウィペットの背骨は、ただ体を支えてるだけじゃないんだ。
走る時は、まるで生き物みたいにグニャグニャ動いて、パワーを生み出す手助けをしてるんだよ!
背骨は私たちのメインエンジンなの!
脊椎の屈曲・伸展という事実
Schillingら(2006)の研究により、ウィペットは走行時に脊椎(特に腰椎部分)をダイナミックに屈曲・伸展させていることが、運動学的なデータとして確認されています。
脊椎エンジン(Spinal Engine)の応用仮説
この現象を、Gracovetsky(1988)が人体モデルとして提唱した「Spinal Engine」に当てはめて考えるアプローチがあります。
「脚が動くから背骨が動くのではなく、背骨の駆動こそが脚をより遠くへ運ぶ主動力である」とする大胆な仮説ですが、これは四足動物において完全に証明されたコンセンサス(定説)ではありません。しかし、体幹の駆動がストライド長に大きく寄与しているという視点は、犬の走行バイオメカニクスにおいて非常に重要な要素と考えられています。
ローツェ背骨は単なる骨の柱じゃなくて、パワーを増幅させる大事な装置なんだ。
背中が柔らかいことが、私たちウィペットの速さの源なんだね!
筋膜の弾性エネルギーと力の伝達
ヌプツェ筋肉の力だけじゃない、「ゴムの力」も使ってるんだよ。
背中にある大きな膜が、エネルギーを蓄えて跳ね返してくれるんだって!これがあるから私たちウィペットは疲れないの!
筋膜連鎖(Fascial Chain)の役割
解剖学的な事実として、犬の背中を覆う「胸腰筋膜」は、前躯の筋肉と後躯の筋肉を対角線上に繋ぐネットワークを形成しています。
弾性リコイル(跳ね返り)の仮説
Biewener(2003)らが指摘する動物の弾性リコイル(Elastic Recoil)の知見を応用すると、走行メカニズムの更なる深掘りが可能です。
「収縮期に引き伸ばされた筋膜や腱が、ゴムのように元に戻ろうとする力(弾性エネルギー)を解放することで、筋肉の疲労を抑えつつ高速走行を維持している」と考えられています。 これは馬や人間のスポーツ医学からの類推を含む仮説段階の知見ですが、ウィペットの爆発的なスピードを説明する上で有力な視点です。
ローツェ筋肉はエンジン、筋膜は超強力なゴム。
この2つが合わさって、私たちウィペットは疲れ知らずのスピードスターになれるんだね!
競技現場から見たスピード差の要因
ヌプツェここからは私たちウィペットの得意分野、ルアーコーシングのお話!
実際にコースを走っているローツェお姉ちゃんと、そしてパパが気づいた、速さの「本当の秘訣」を教えちゃうね。現場の知恵だよ!
実体験:芝生と砂地での走りの変化
JRC.westなどの競技会に参加している我が家のウィペット「ローツェ」を観察していると、路面によって走法を使い分けていることが分かります。
- 芝生トラック: グリップが効くため、背骨のしなりを最大限に使った「ストライド重視型」の走りに。
- 砂地トラック: 足が沈むため、エネルギーロスを抑えるべく、ピッチ(回転数)を上げて足を素早く抜く走りに。
コーナリングを制する「体幹スタビライザー」
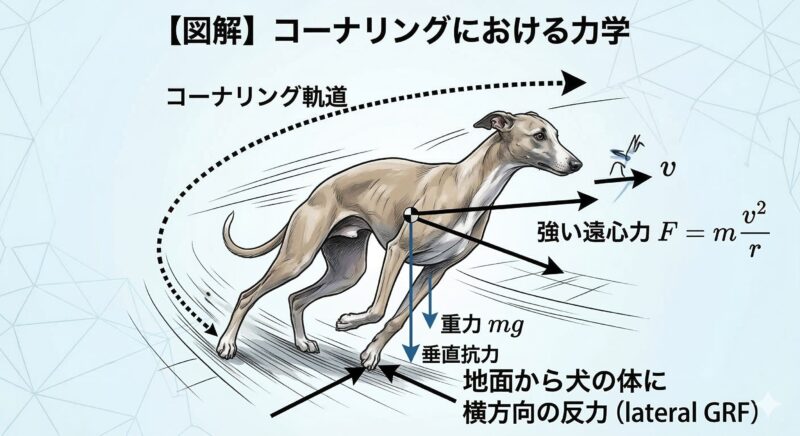
コーナリングでは強い遠心力がかかり、地面から犬の体に横方向の反力が返ってきます。
実際の競技現場では、直線で速い個体でもコーナーで大きく外側に膨らんでしまうケースが多々観察されます。これは、横方向の力に対して背骨を安定させる「多裂筋」などの体幹スタビライザーの能力差によるものと考えられます。
ローツェただ速いだけじゃダメ。
コースの状況に合わせて走り方を変えたり、カーブで踏ん張ったり。
頭と体幹の両方を使ってるんだよ!
成長段階別トレーニングとパピー期の適切なケア
ヌプツェ赤ちゃんの頃から特訓すればいいかって?
ダメダメ!
私たちウィペットの体が大人の「最強エンジン」になるまでには、守らなきゃいけない順番があるんだ。
大切に育ててね!
医学的根拠に基づくタイムライン
ウィペットの骨格が完成するのは、骨端線(成長板)が閉鎖する生後14〜18ヶ月頃です。
- 生後5ヶ月前後
骨格の急成長期。関節軟骨が脆弱な時期であり、高いジャンプやコンクリートでの全力疾走は、将来的な関節トラブルを招く恐れがあります。 - 生後12ヶ月まで
骨は伸びても、それを支える深層筋(体幹)が未熟な時期。無理なコーナリング練習は避け、自由運動でボディコントロールを養います。
コンディショニングとしてのノーズワーク
本格的なスプリントを始める前のパピーでもできるのが「ノーズワーク」です。においを探して頭を左右に動かす動作は、頸椎から腰椎にかけての微細な回旋運動を促し、将来のコーナリングを支える深層筋(スタビライザー)を安全に養うことができます。
▼「もう大人と同じ体?」その勘違いが愛犬の走行寿命を縮めるかもしれません ▼

▼ ゆっくり嗅ぐだけで速くなる?知育遊びを「競技特化トレ」に激変させる10分間の室内ルーティン▼
 ローツェ
ローツェ1歳半になるまでは、じっくり土台作り。
フカフカの芝生で遊んだり、クンクン活動したり。
それが一番の近道なんだよ!
ウィペットの走りに関するQ&A
ヌプツェみんなが気になる疑問に、科学と経験の両方からお答えしちゃうよ!
ここを読めばあなたもウィペット博士になれるかも!
- ウィペットが他犬種より速い決定的な理由は?
-
脚の筋肉量だけでなく、背骨のダイナミックな動き(Spinal Engine的要素)と、空中に2回浮くダブルサスペンションギャロップによって、自身の体格を遥かに上回る「ストライド(歩幅)」を生み出せるためです。脚の回転の速さだけでなく、一歩の伸びが桁違いなのです。
- うちの子がピッチ型かストライド型か見分ける方法は?
-
散歩中の「オーバートラッキング」をチェックしてください。後ろ足の着地点が前足の跡を大きく越えて踏み込んでいるなら、股関節や背骨の柔軟性が高く、ストライドを伸ばせるポテンシャル(柔軟性の指標)が高いと言えます。
- ルアーコーシングでタイムを縮めるコツは?
-
直線の速さだけでなく、コーナリングでの「lateral GRF(横方向の反力)」をいなす体幹の強さが重要です。ノーズワークのような回旋運動で深層筋を整えることが、結果的にカーブでのタイム短縮に繋がります。
- 走る時のハーネスと首輪、走りに影響しにくいのは?
-
肩甲骨の動きや背骨の連動を制限しないことが最優先です。Y字型の非制限的ハーネスか、首への圧迫を分散する幅広の首輪が、走行バイオメカニクスの観点からは推奨されます。
- 足を速くするために必要な栄養は?
-
「特定の食品で足が速くなる」という科学的根拠はありません。しかし、筋肉の材料となる良質なタンパク質をバランスよく摂取し、細胞の修復が行われる「休息の質(背骨を伸ばして眠れる寝床)」を整えることが、最良のコンディショニングです。
ローツェお散歩の時の歩き方や、お家での寝相にも、速く走るためのヒントが隠されているんだよ!
毎日よく観察してね!
まとめ:ウィペットの速さの真実を知り、しなやかな走りを一生守り抜くために

ウィペットがなぜこれほどまでに速いのか。その答えは、脚の筋力という断片的な要素ではなく、全身が連動する驚異的なバイオメカニクスの結晶にあります。
背骨のダイナミックな屈曲と伸展を推進力へと変換する「脊椎エンジン(Spinal Engine)」、1歩の間に2回もの滞空時間を作る「ダブルサスペンションギャロップ」、そして筋肉の疲労を最小限に抑えながら爆発的なエネルギーを解放する「筋膜の弾性リコイル」。
これら3つの柱が、時速60kmという人類の常識を超えたスピードを支えています。
この「走りの仕組み」を知ることは、単なる知識の習得ではありません。ルアーコーシングの現場で、砂地と芝生のコンディションに合わせて愛犬の走りを正しく分析し、コーナーでの遠心力に耐えるための体幹(スタビライザー)の重要性に気づくことは、愛犬のパフォーマンスを最大化するための大きな一歩となります。
同時に、その強烈な推進力を支える骨格が完成するまでには、生後18ヶ月という長い月日が必要です。骨端線(成長板)が閉鎖するまでは過度な負荷を避け、成犬になってからはノーズワークなどの低負荷な回旋運動で「背中の柔軟性」をメンテナンスしてあげてください。科学的な裏付けに基づいた正しい知識とケア、そして良質な栄養と広々とした寝床での休息こそが、ウィペットという究極のスプリンターに私たちが贈れる最高の愛情です。
あなたが愛犬の走りの個性を深く理解し、その輝くような疾走を一生涯、隣で見守り続けられることを心から願っています。
あなたの愛犬が健康に暮らし、あなたと一緒に最高の思い出ができることを願っています。
ローツェ最後まで読んでいただきありがとうございました。
もしよかったら下のボタンからインスタにも遊びに来てね!
【参考文献・エビデンス出典】
Wilson, A. M. et al. (2013) Locomotion dynamics of the cheetah and racing greyhound Nature.
- (チーターとレーシング・グレイハウンドの走行ダイナミクス研究。ウィペット固有のデータではないが、サイトハウンド全般の走行メカニクス理解の参照として使用)
Schilling, N., & Hackert, R. (2006) Sagittal spinal kinematics of dogs galloping on a treadmill Journal of Experimental Biology.
- (ギャロップ時の脊椎の屈曲・伸展運動に関する運動学的データの出典)
Walter, R. M., & Carrier, D. R. (2007) Ground force patterns in galloping dogs Journal of Experimental Biology.
- (前肢制動・後肢推進モデルを証明した床反力研究の出典)
Carrier, D. R. et al. (1998) Forelimb function during high-speed galloping in dogs Journal of Experimental Biology.
- (高速ギャロップ時の前肢の衝撃吸収と制動に関する研究の出典)
Alexander, R. McN. (2003) Principles of Animal Locomotion Princeton University Press.
- (動物の走行速度を決定する運動学的基本式の出典)
Gracovetsky, S. N. (1988) The Spinal Engine Springer.
- (脊椎が推進力を駆動するという理論概念の原典)
Biewener, A. A. (2003) Animal Locomotion Oxford University Press.
- (骨格と筋膜の弾性エネルギーに関するバイオメカニクス的知見の出典)
Zink, M. C., & Van Dyke, J. B. (2013) Canine Sports Medicine and Rehabilitation Wiley-Blackwell.
- (スポーツドッグの成長タイムラインとスタビライザー筋に関する専門書の出典)
